Machine Learning By Andew Ng - Week 5
Cost Function and Backpropagation
Cost Function
-
Let’s first define a few variables that we will need to use:
-
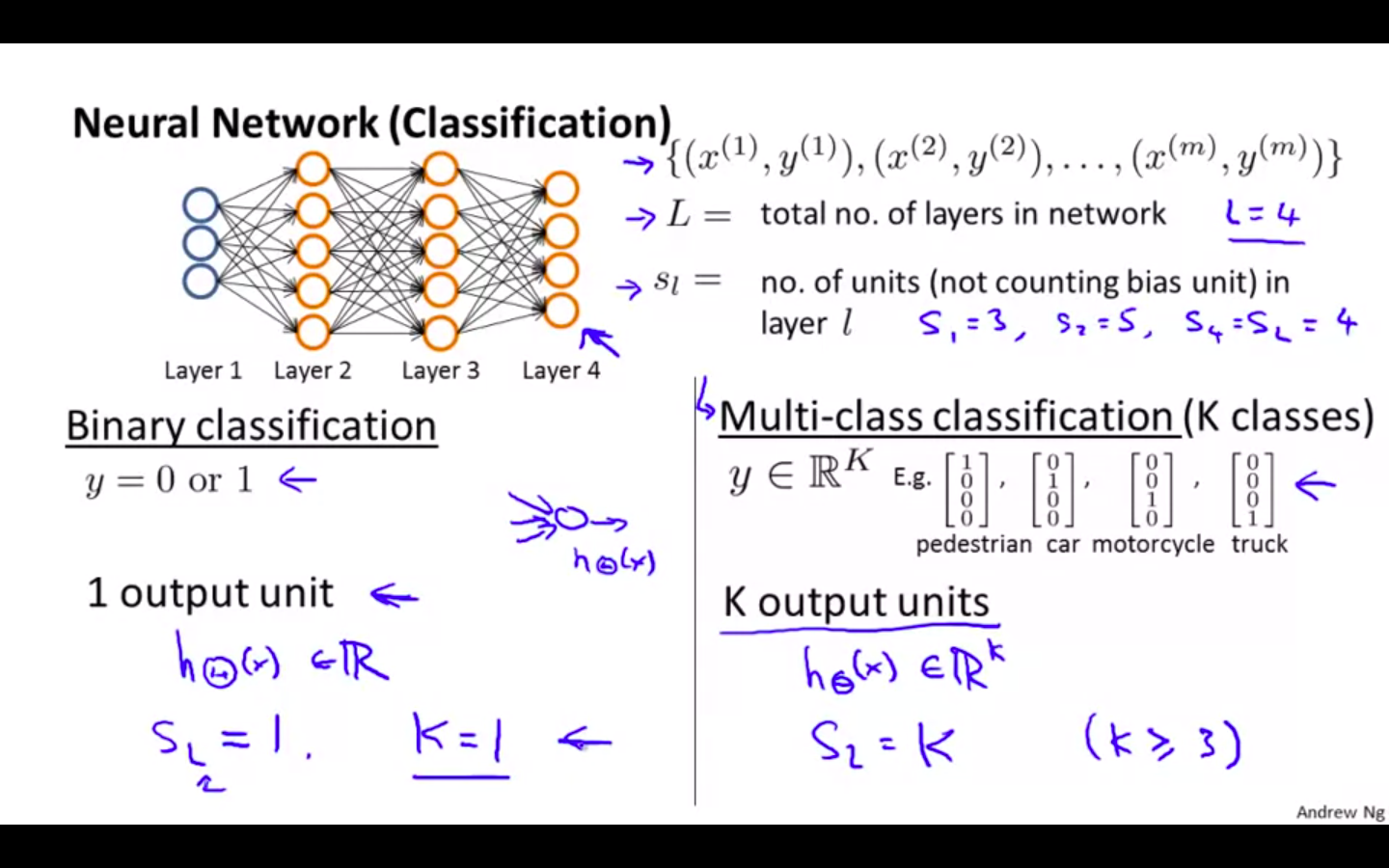
L = total number of layers in the network
-
s_l = number of units (not counting bias unit) in layer l
-
K = number of output units/classes
-
-
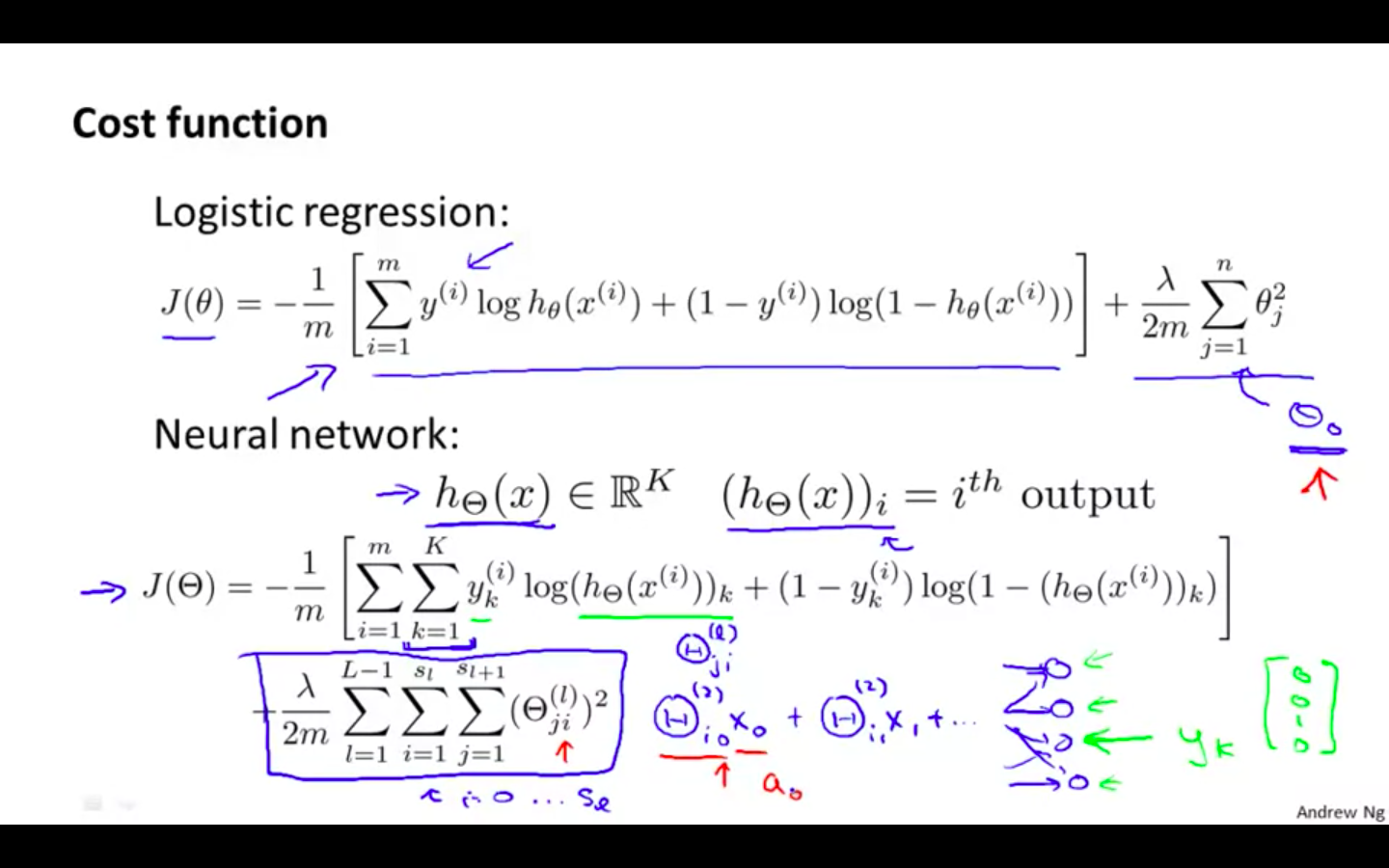
We have added a few nested summations to account for our multiple output nodes.
-
In the first part of the equation, before the square brackets, we have an additional nested summation that loops through the number of output nodes.
-
In the regularization part, after the square brackets, we must account for multiple theta matrices.
-
The number of columns in our current theta matrix is equal to the number of nodes in our current layer (including the bias unit).
-
The number of rows in our current theta matrix is equal to the number of nodes in the next layer (excluding the bias unit).
-
As before with logistic regression, we square every term.
-
Note
-
the double sum simply adds up the logistic regression costs calculated for each cell in the output layer
-
the triple sum simply adds up the squares of all the individual Θs in the entire network.
-
the i in the triple sum does not refer to training example i
-
Backpropagation Algorithm
-
“Backpropagation” is neural-network terminology for minimizing our cost function, just like what we were doing with gradient descent in logistic and linear regression. Our goal is to compute: min J ( theta )
-
That is, we want to minimize our cost function J using an optimal set of parameters in theta.
-
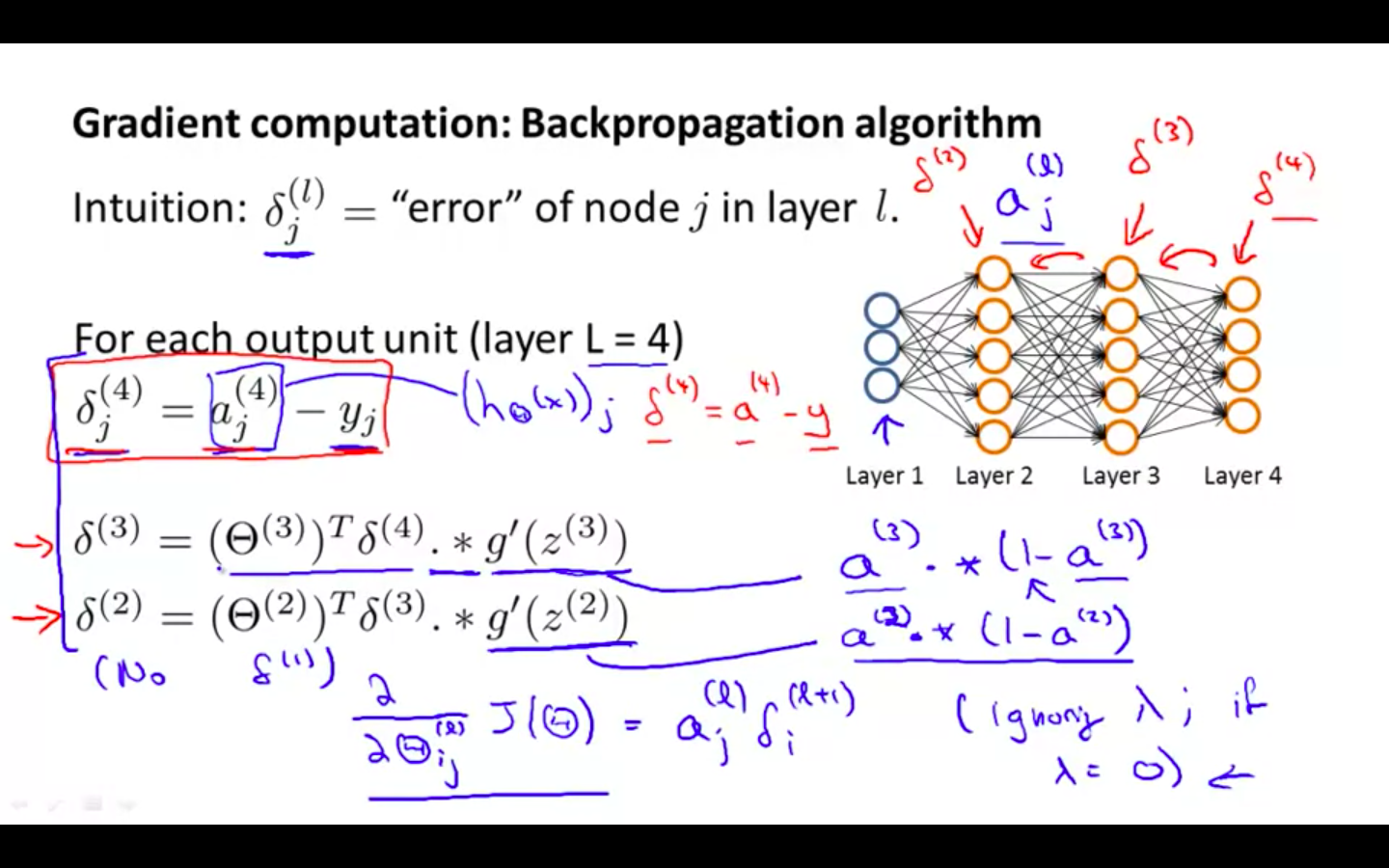
To compute the partial derivative of J(Θ):
- Backpropagation Algorithm is used
-
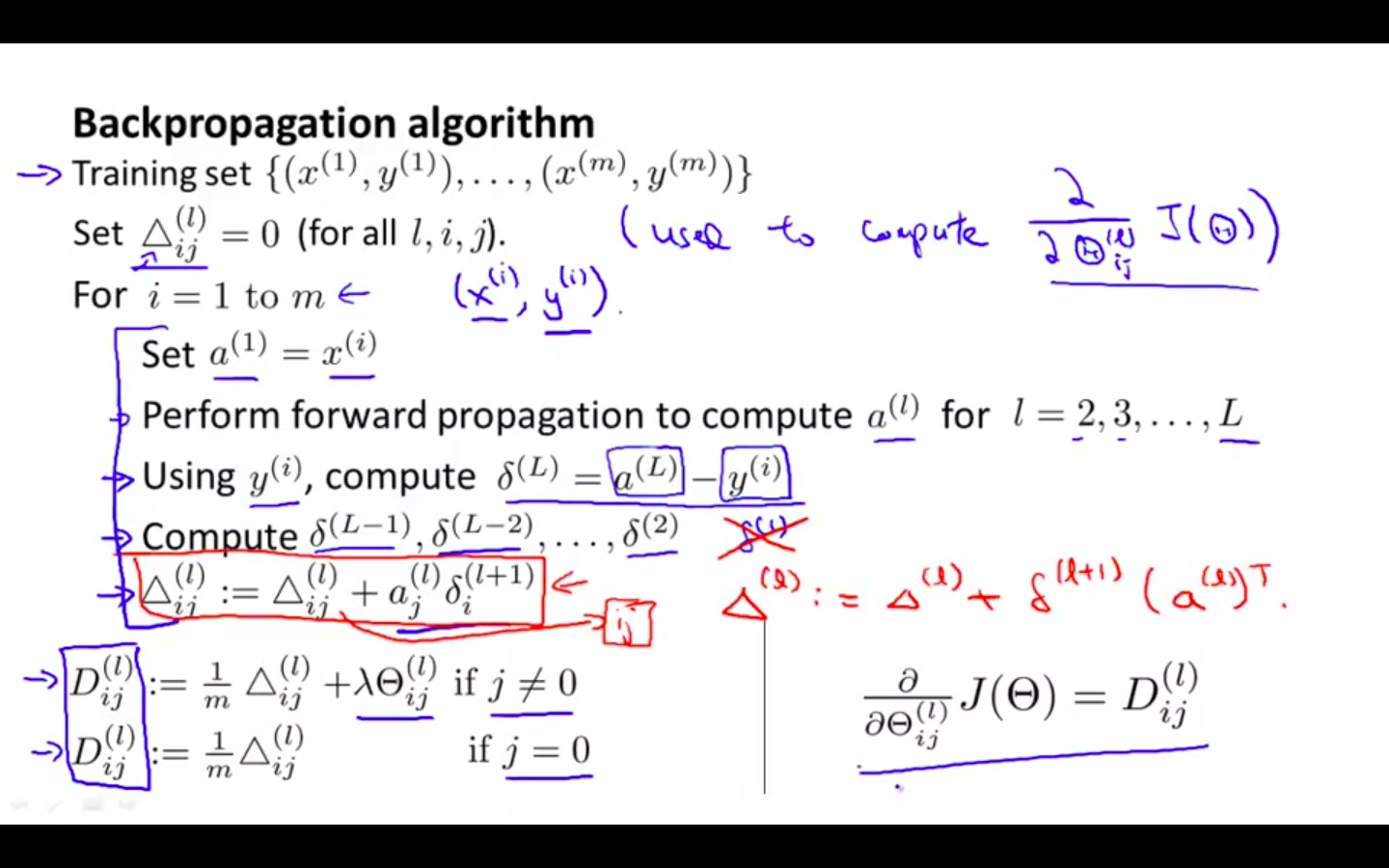
One training example
- Multiple training example
-
Process

Backpropagation Intuition
-
Forward Propagation
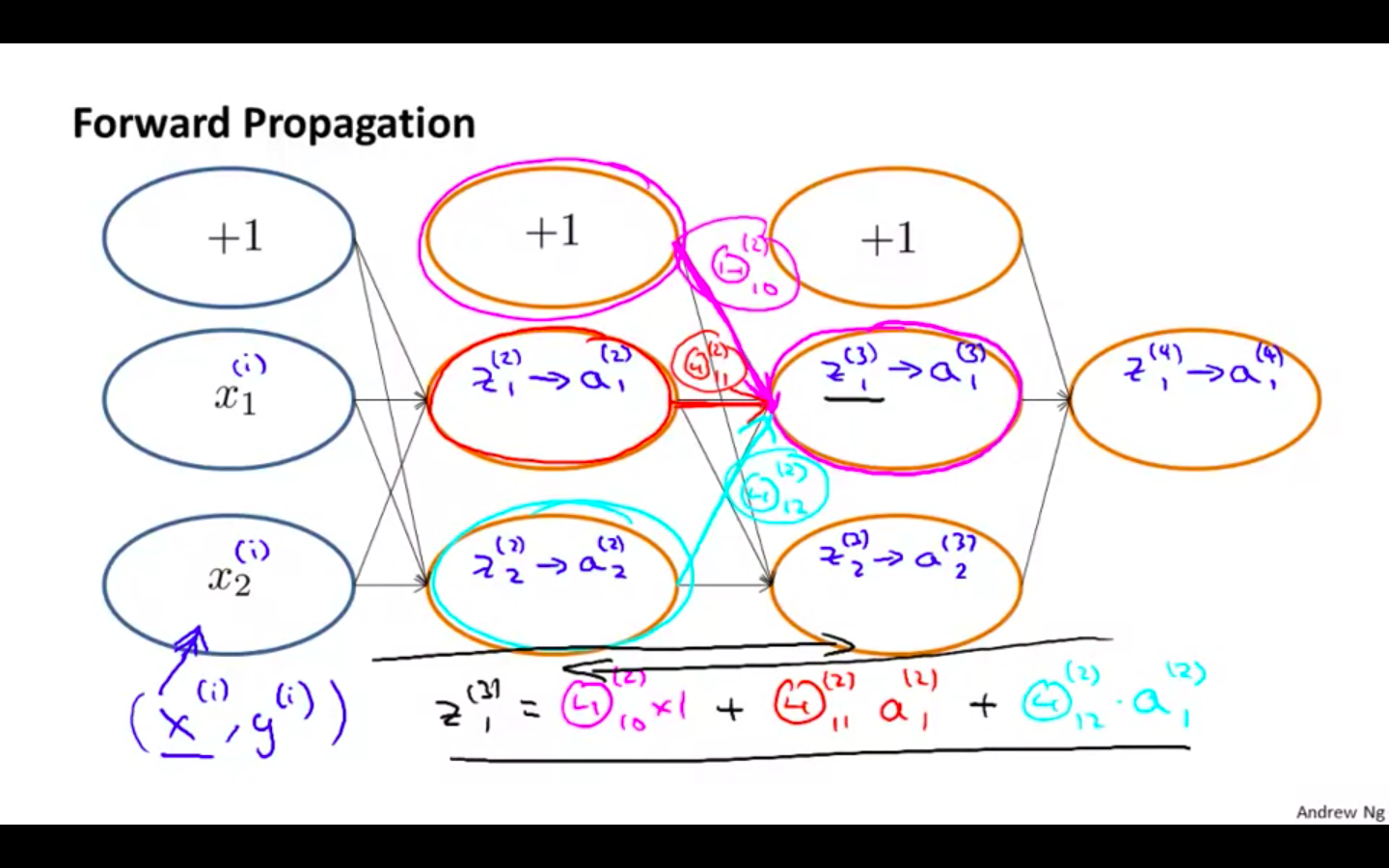
-
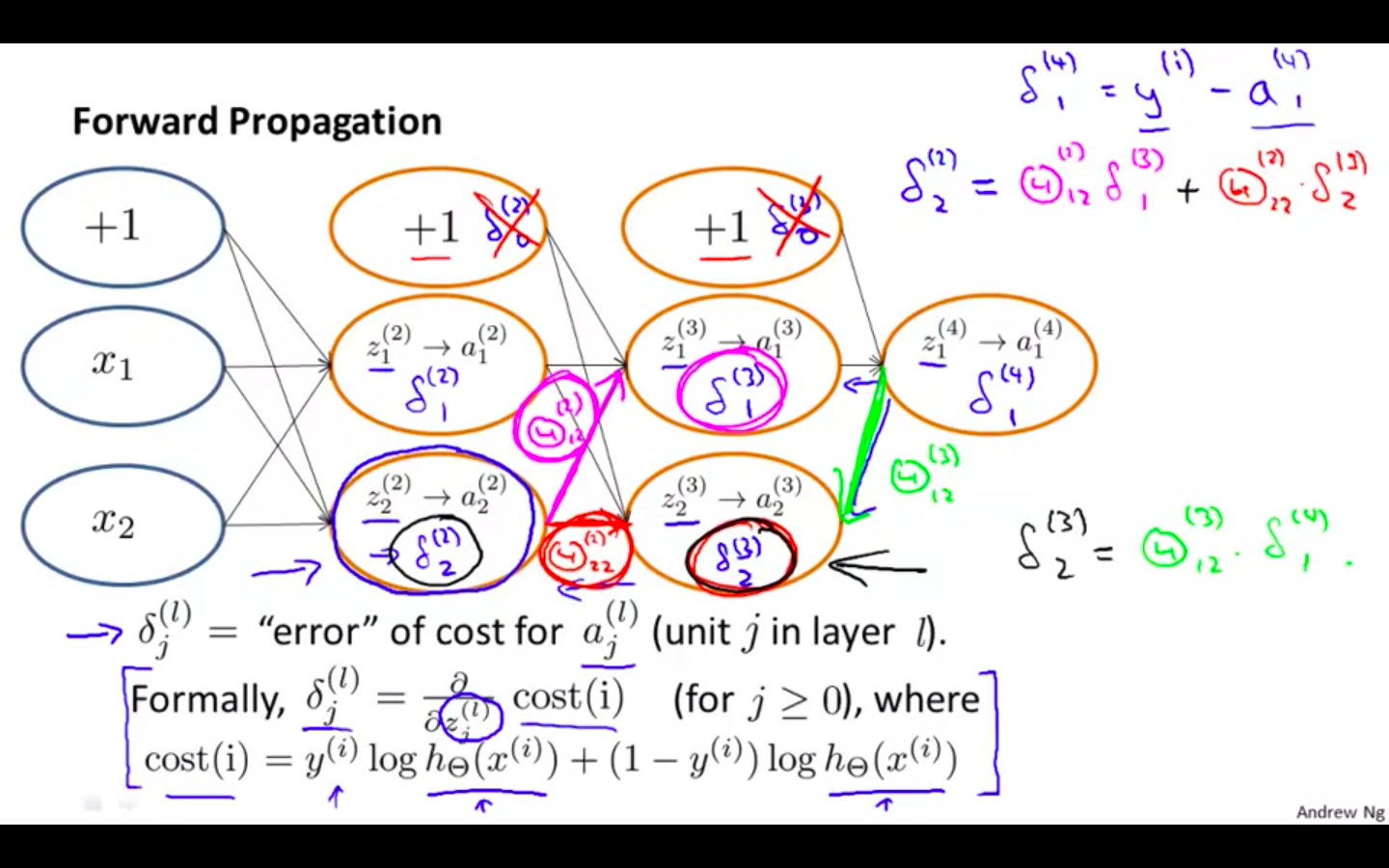
Backward Propagation
-
The delta values are actually the derivative of the cost function
-
Recall that our derivative is the slope of a line tangent to the cost function, so the steeper the slope the more incorrect we are.
-
Backpropagation in Practice
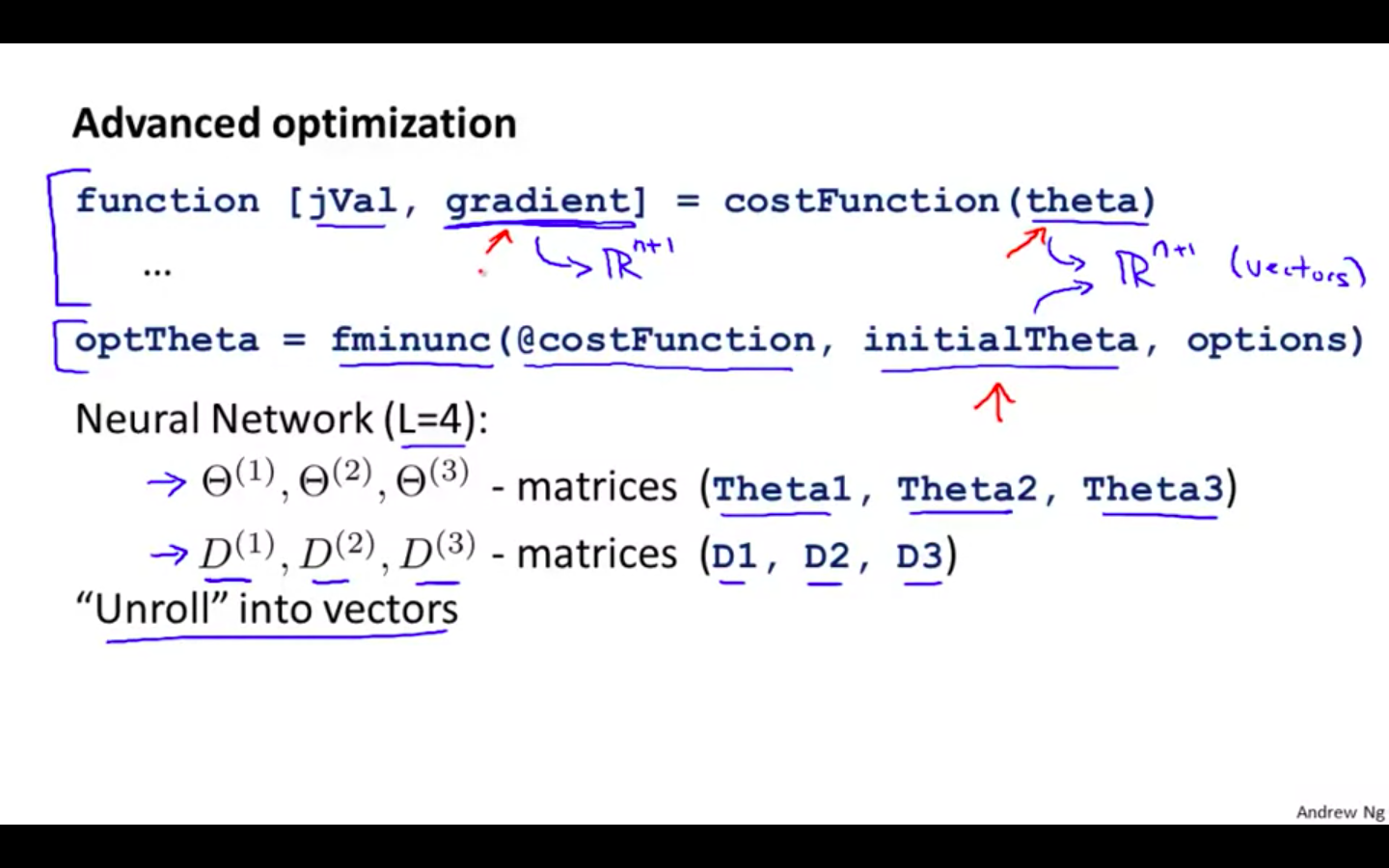
Implementation Note: Unrolling Parameters
-
Advance Optimisation
- It needs theta to be in vectors
-
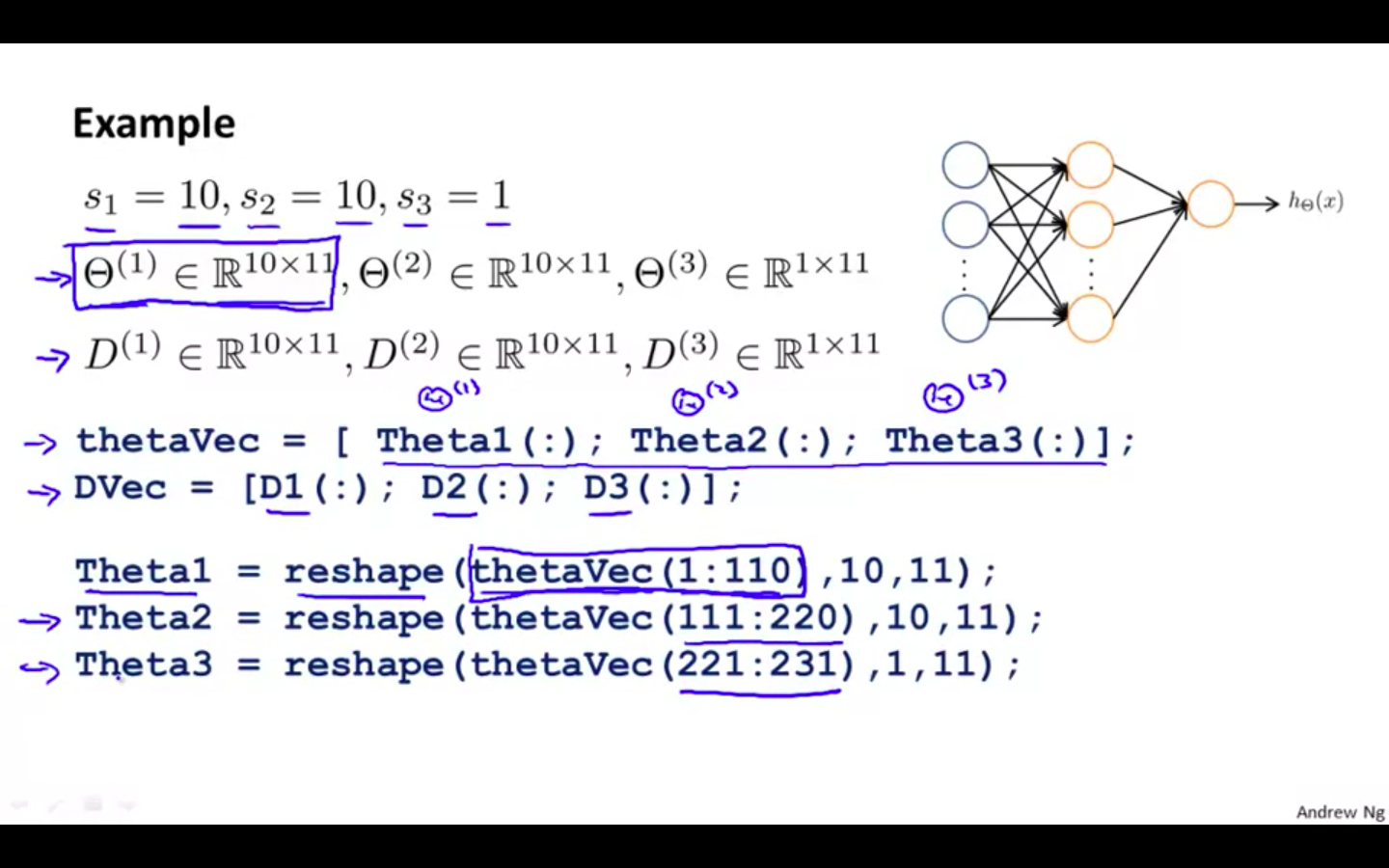
Example
-
For efficient FP and BP values are expected in matrices and efficient Cost Function are expected in vectors
-
Unrolling matrices into vectors in Octave
-
-
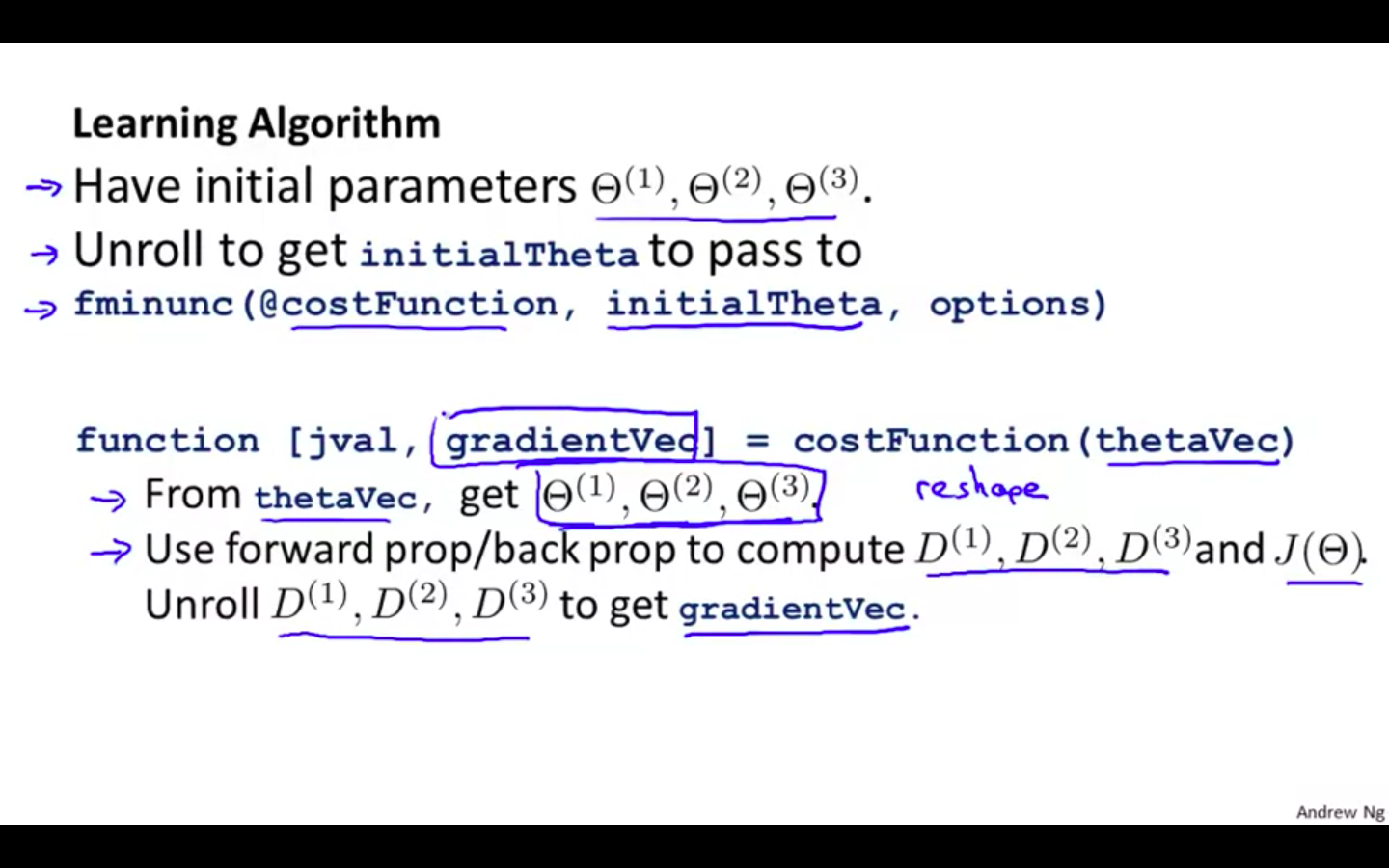
Learning Algorithm
- Process of unrolling
-
Octave Snippets
- Matrices → Vectors
thetaVector = [ Theta1(:); Theta2(:); Theta3(:); ]
deltaVector = [ D1(:); D2(:); D3(:) ]
- Vectors → Matrices
Theta1 = reshape(thetaVector(1:110),10,11)
Theta2 = reshape(thetaVector(111:220),10,11)
Theta3 = reshape(thetaVector(221:231),1,11)
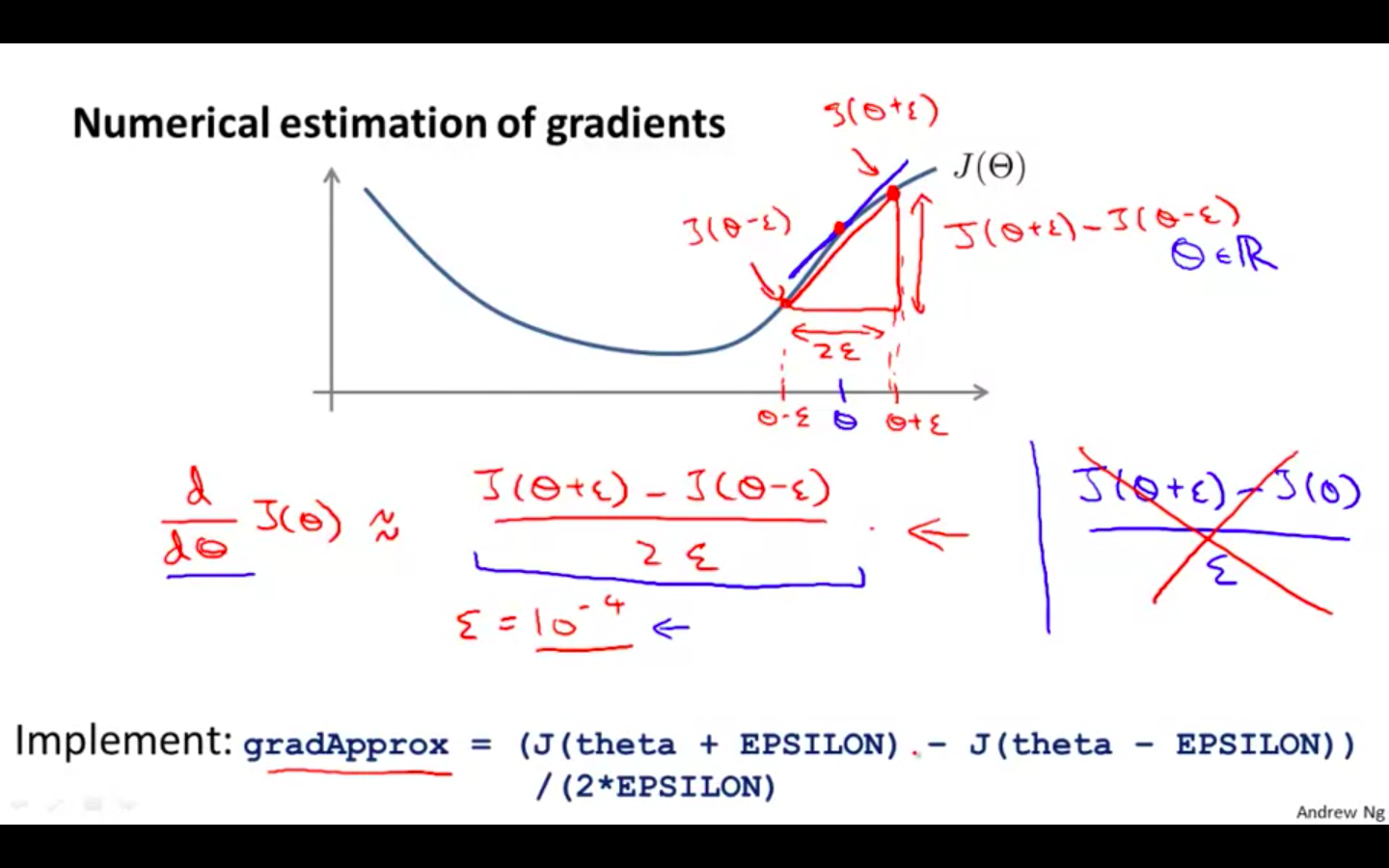
Gradient Checking
-
Gradient checking will assure that our backpropagation works as intended.
-
We can approximate the derivative of our cost function with:
-
Epsilon = 10^-4 guarantees that the math works out properly.
-
If the value for ϵ\epsilonϵ is too small, we can end up with numerical problems.
-
-
Parameter Vector
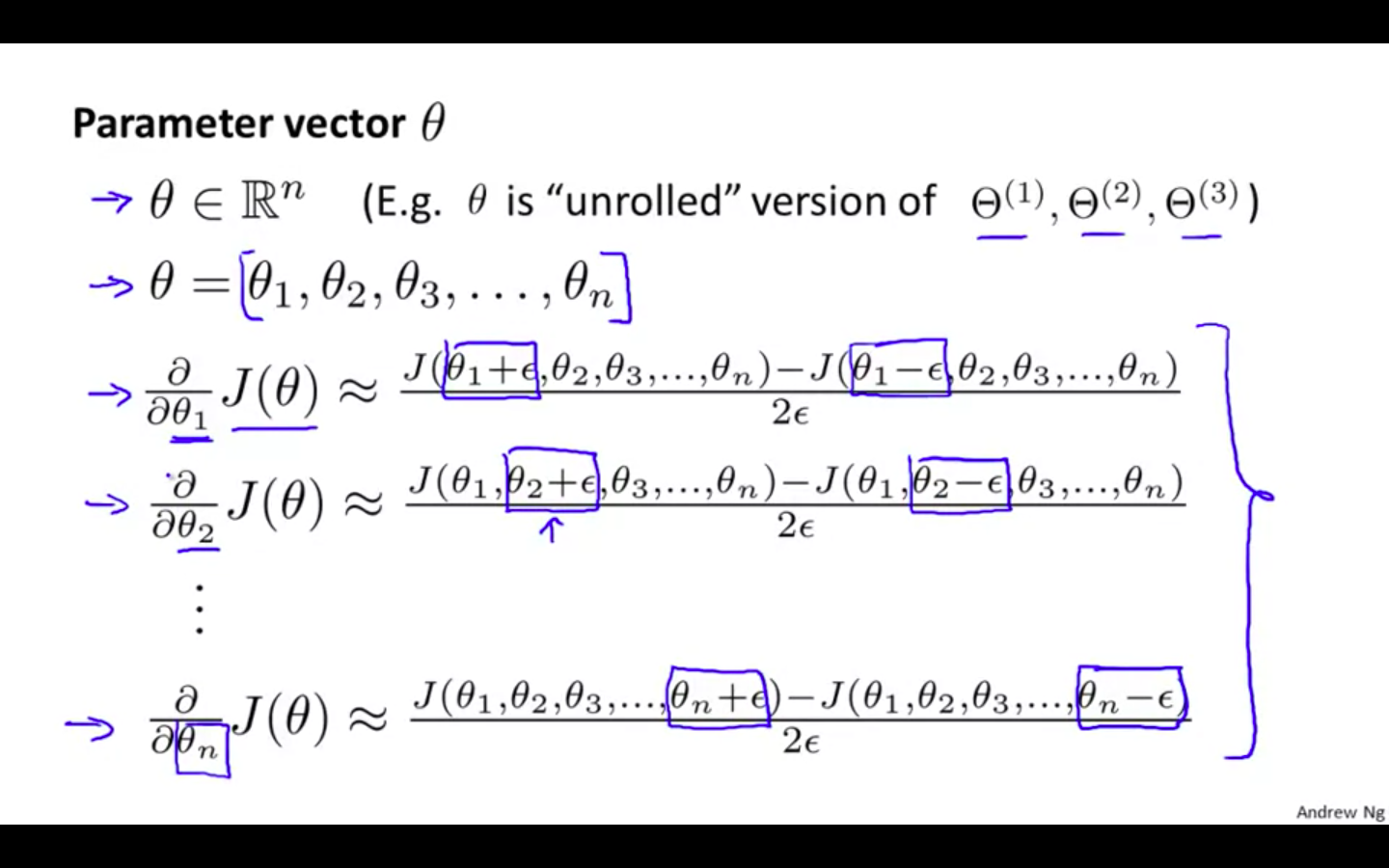
-
Process
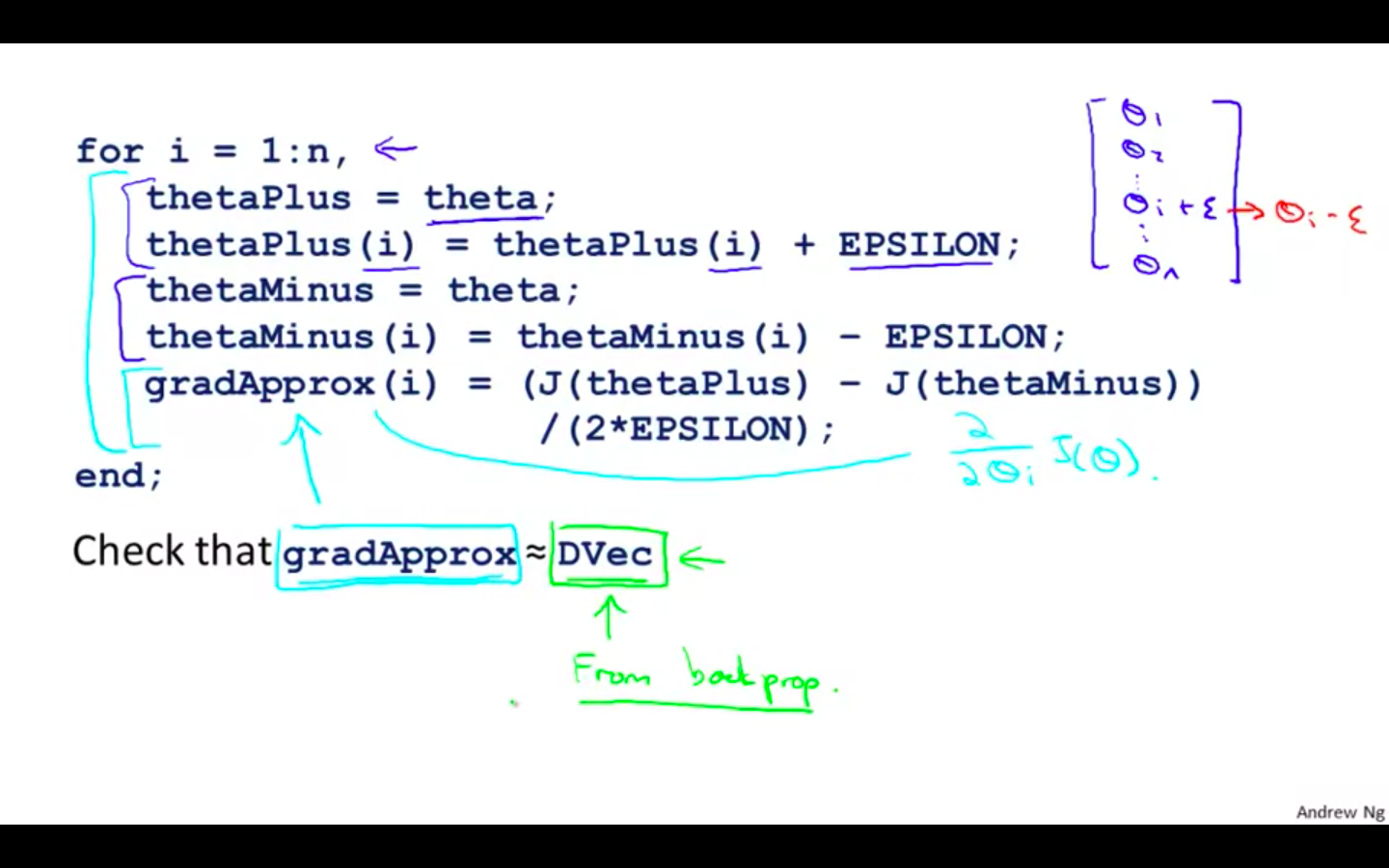
- So once we compute our gradApprox vector, we can check that gradApprox ≈ deltaVector.
-
Notes
-
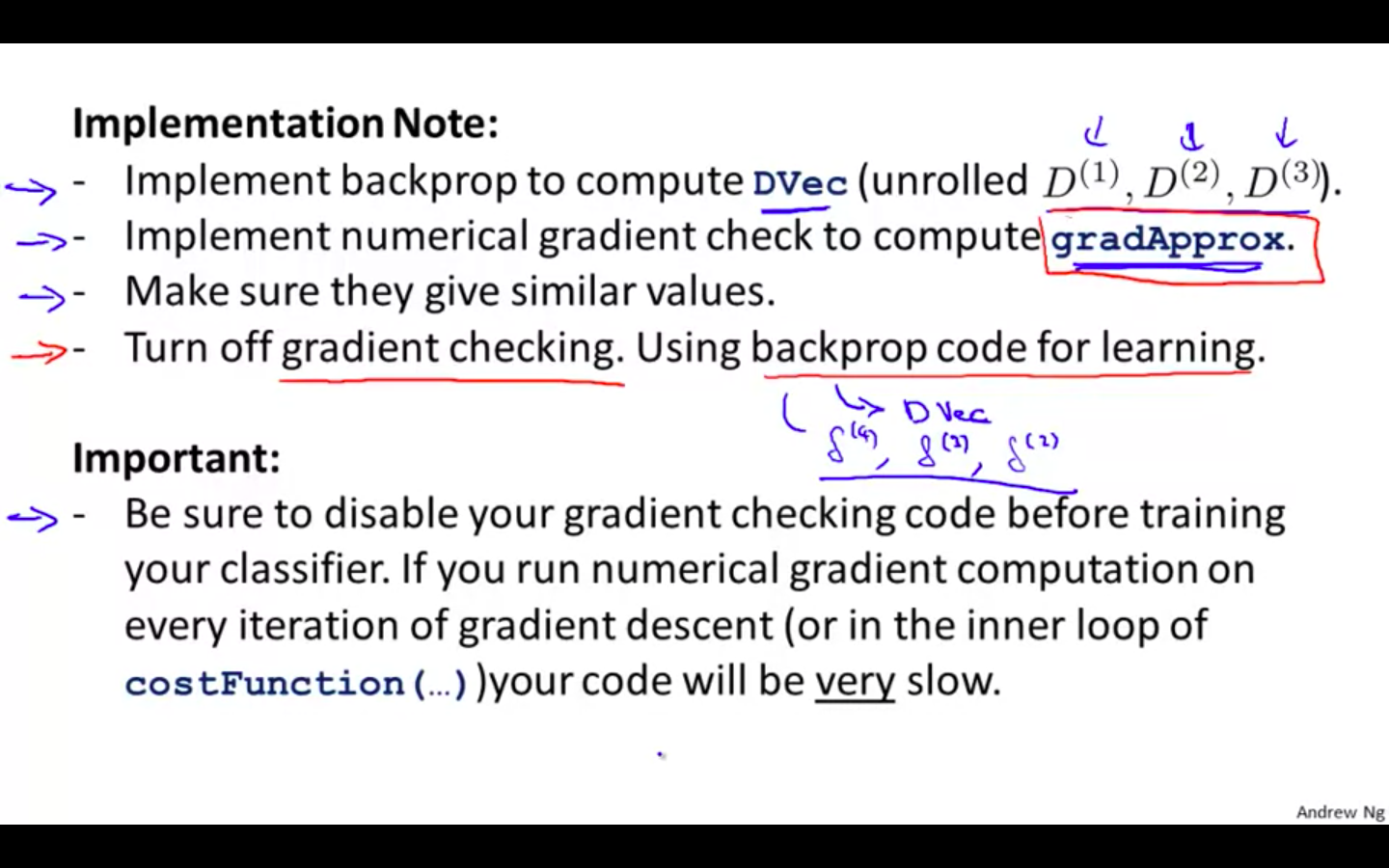
Implementation Note
-
Implement BP to compute DVec
-
Implement numerical gradient check to compute gradApprox
-
Make sure they give similar values
-
Turn of gradient checking. Using BP code for learning
-
-
Important
-
Be sure to disable your gradient checking code before training your classifier.
-
If you run numerical gradient computation on every iteration of gradient descent ( or in the inner loop of costFunction() ) code will be ver slow
-
- Octave Snippet
-
epsilon = 1e-4;
for i = 1:n,
thetaPlus = theta;
thetaPlus(i) += epsilon;
thetaMinus = theta;
thetaMinus(i) -= epsilon;
gradApprox(i) = (J(thetaPlus) - J(thetaMinus))/(2*epsilon)
end;
Random Initialisation
-
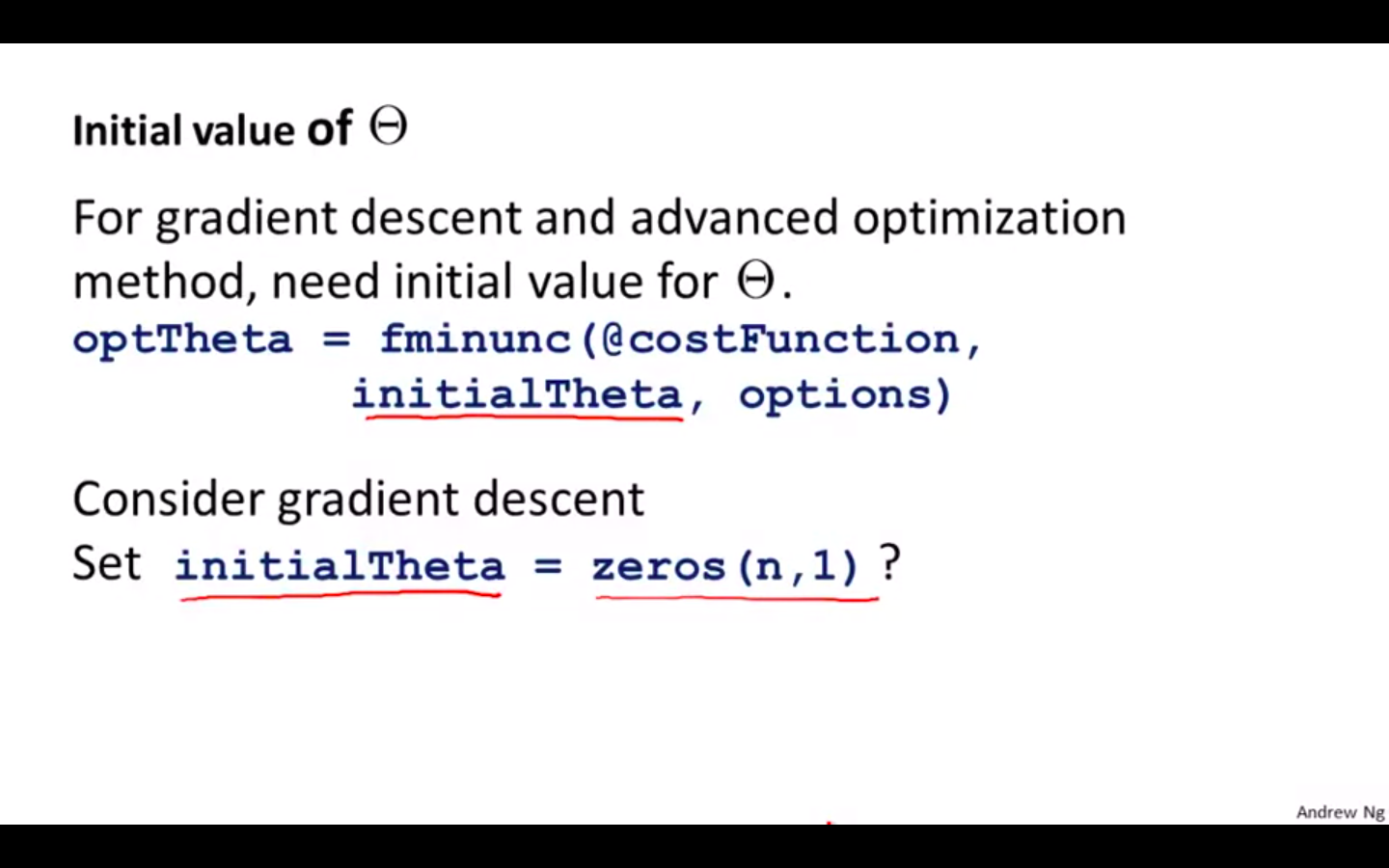
Initial Value of Theta
- We need the initialise theta
-
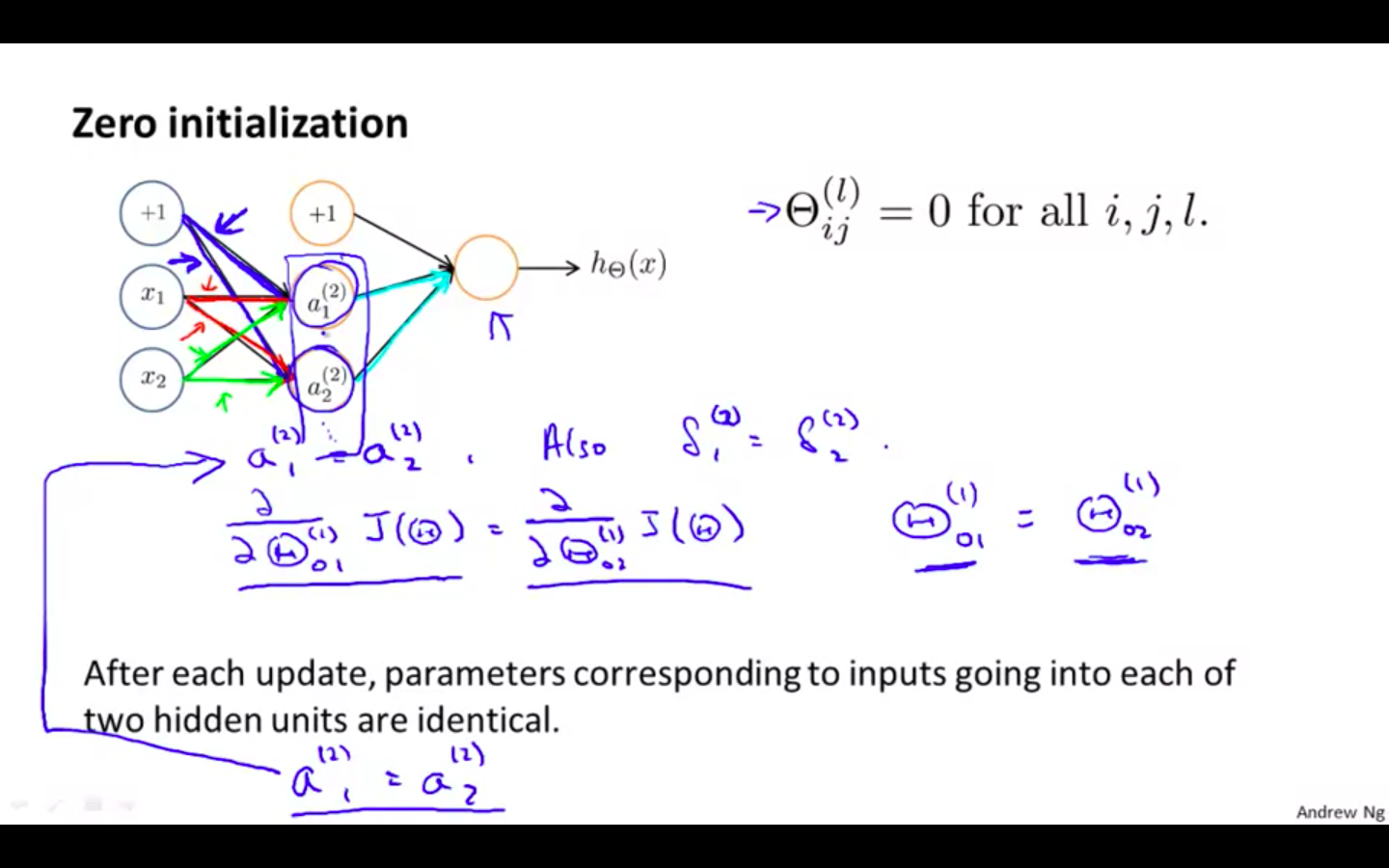
Zero Initialisation
-
When initialised with zero
-
All the unit in the hidden layer will perform the same activation function
-
Neural Network will not be able to learn for new features
-
-
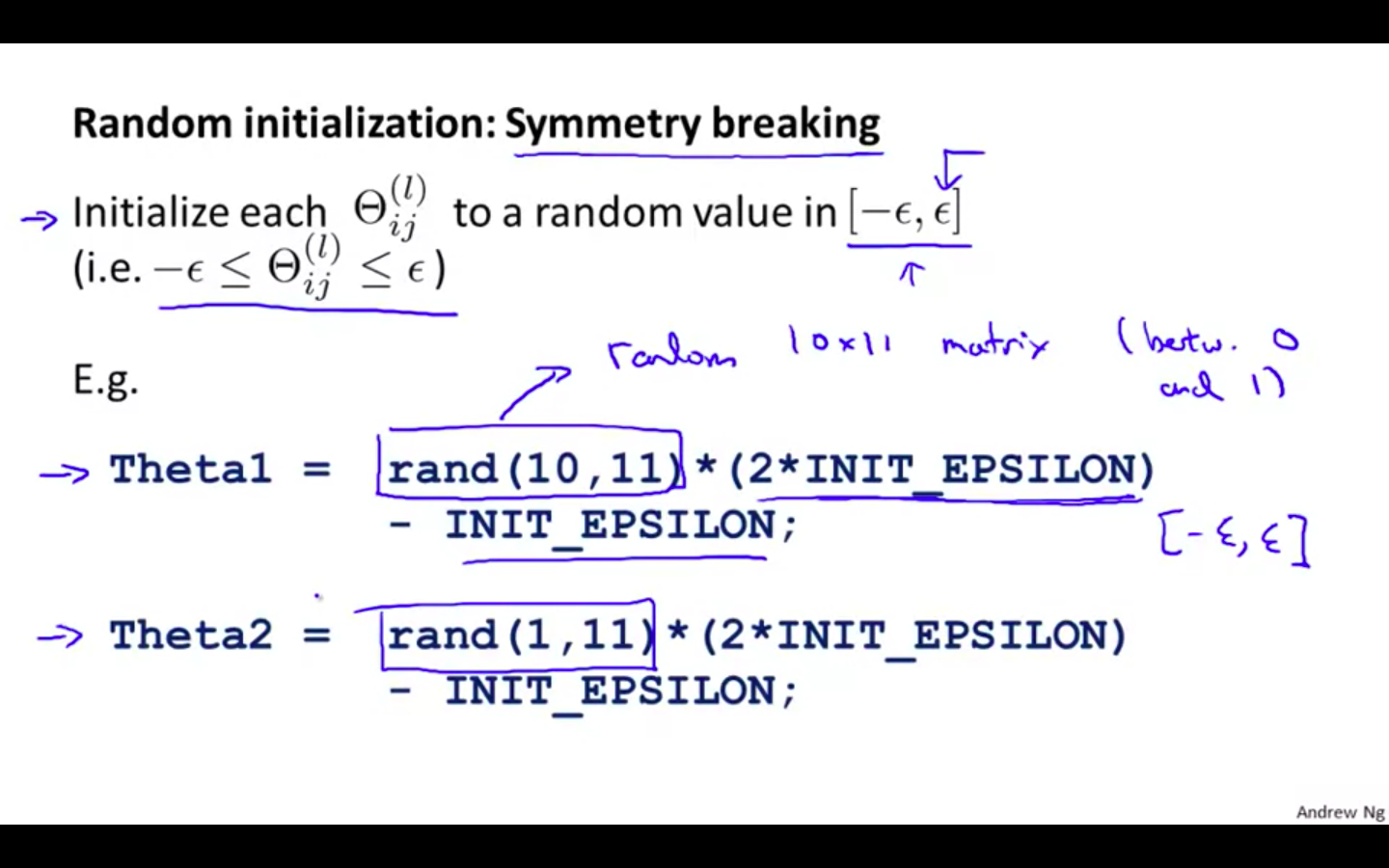
Random Initialisation
-
rand(x,y) is just a function in octave that will initialise a matrix of random real numbers between 0 and 1.
-
(Note: the epsilon used above is unrelated to the epsilon from Gradient Checking)
-
-
Octave Snippets
If the dimensions of Theta1 is 10x11, Theta2 is 10x11 and Theta3 is 1x11.
Theta1 = rand(10,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
Theta2 = rand(10,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
Theta3 = rand(1,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
Putting It Together
-
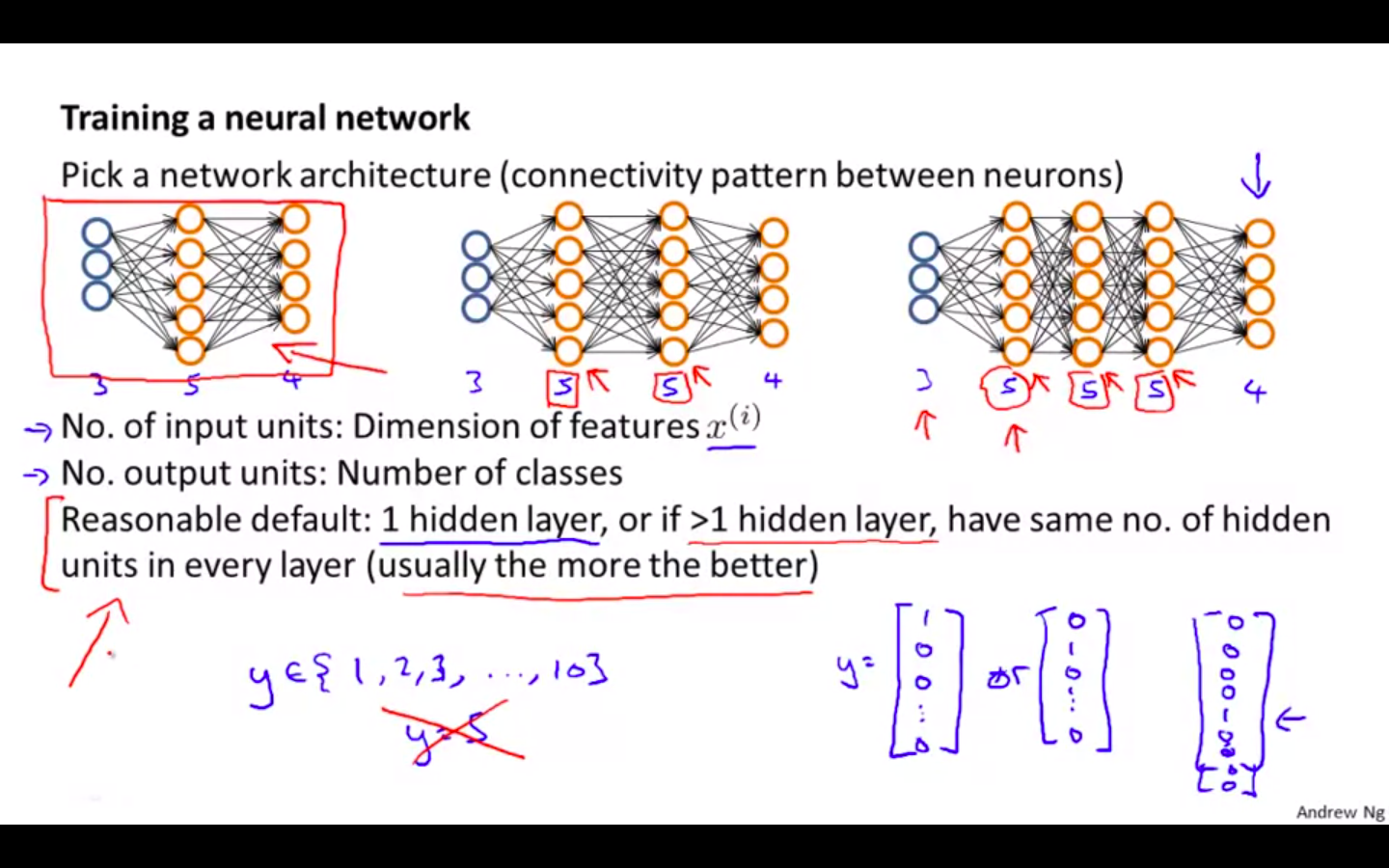
First, pick a network architecture; choose the layout of your neural network, including how many hidden units in each layer and how many layers in total you want to have.
-
Number of input units = dimension of features x^i
-
Number of output units = number of classes
-
Number of hidden units per layer = usually more the better (must balance with cost of computation as it increases with more hidden units)
-
Defaults: 1 hidden layer. If you have more than 1 hidden layer, then it is recommended that you have the same number of units in every hidden layer.
-
-
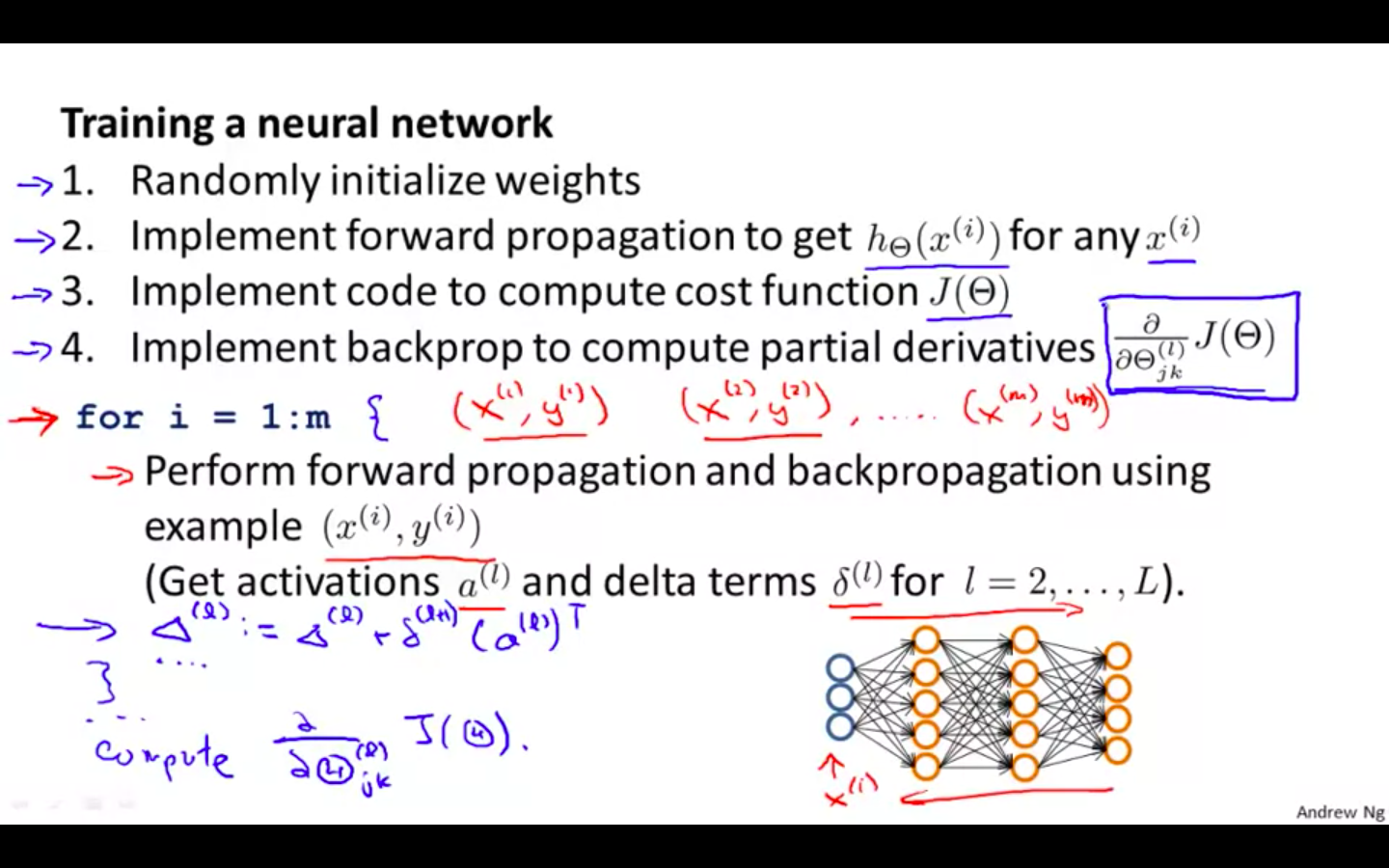
Training a Neural Network
-
Randomly initialise the weights
-
Implement forward propagation to get h(x^i) for any x^i
-
Implement the cost function
-
Implement backpropagation to compute partial derivatives
-
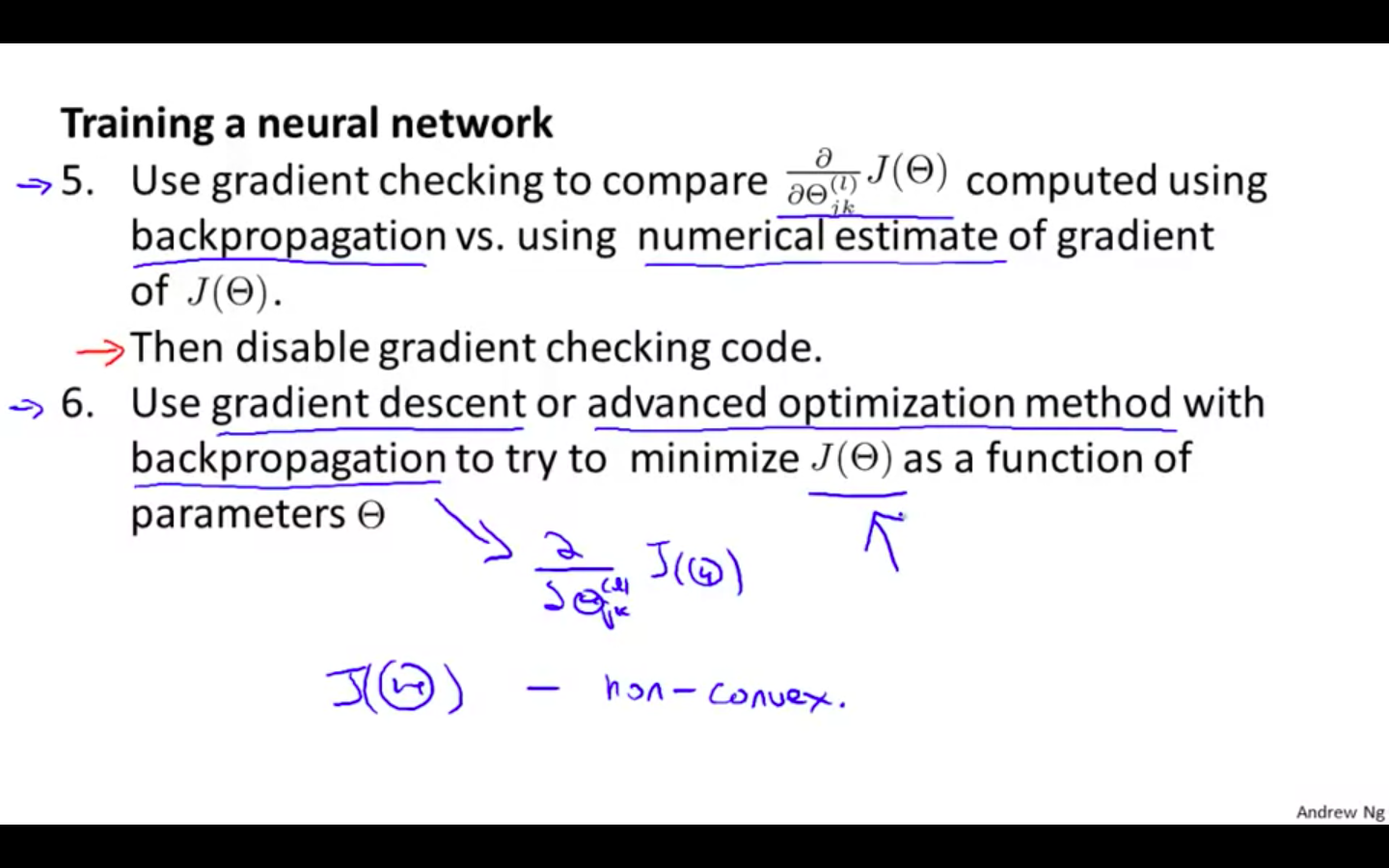
Use gradient checking to confirm that your backpropagation works. Then disable gradient checking.
-
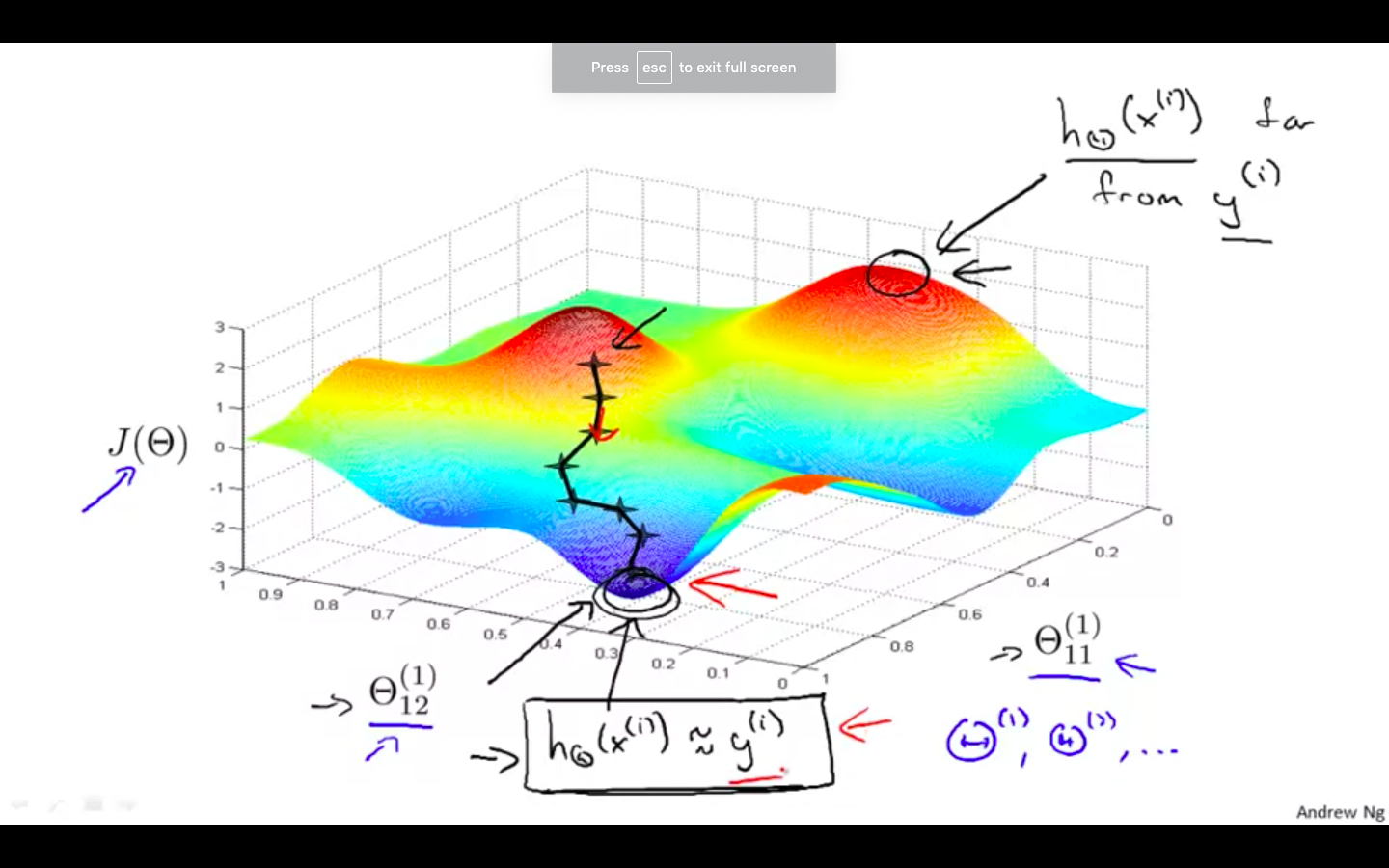
Use gradient descent or a built-in optimization function to minimize the cost function with the weights in theta.
- Steps 1 - 4
- Steps 5 - 6
-
-
However, keep in mind that J ( theta ) s not convex and thus we can end up in a local minimum instead.
-
Octave Snippets
- When we perform forward and back propagation, we loop on every training example
for i = 1:m,
Perform forward propagation and backpropagation using example (x(i),y(i))
(Get activations a(l) and delta terms d(l) for l = 2,...,L